|||
|||
Calibrate the extrinsic parameters between a stereo camera and a 3D LiDAR using line and plane constraints.
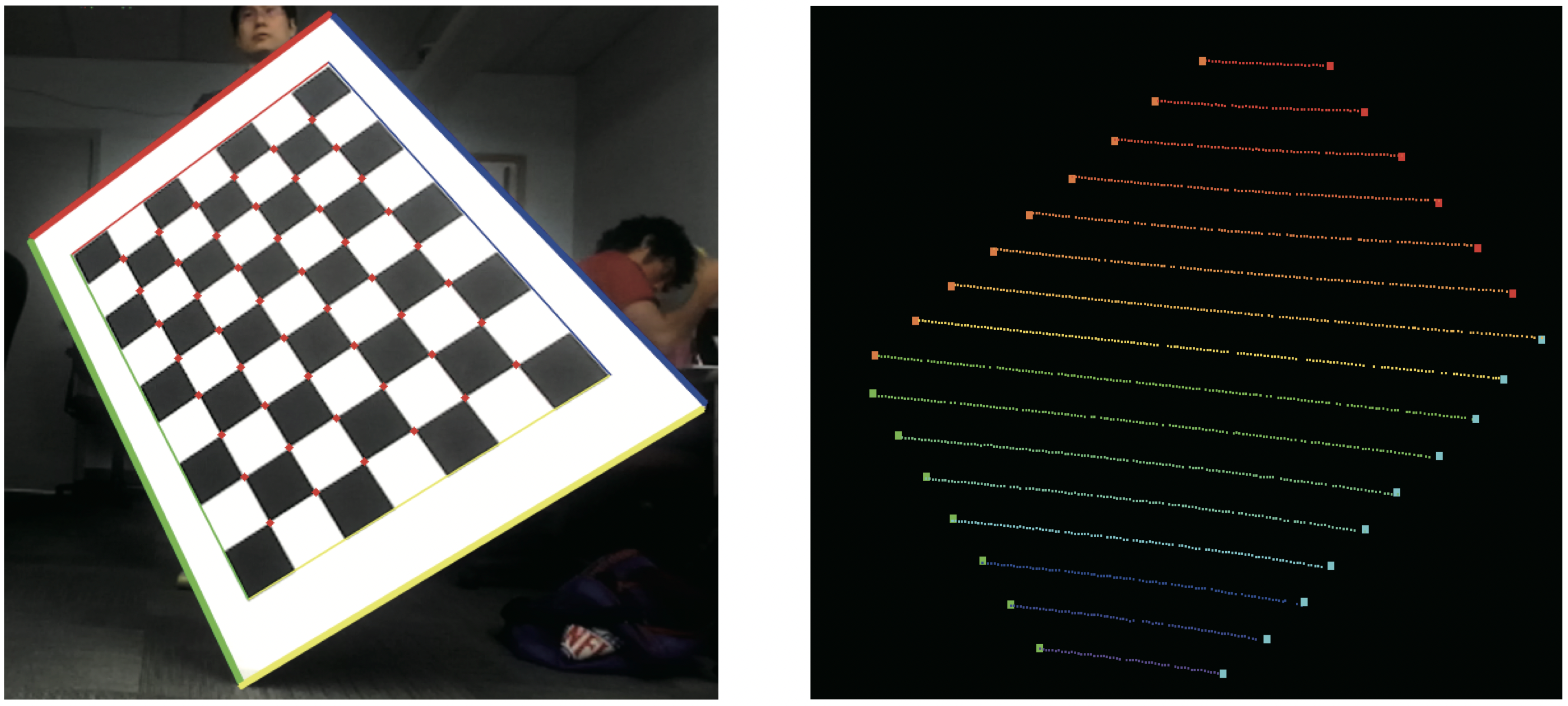 Line and plane extraction from image and 3D LiDAR.
Line and plane extraction from image and 3D LiDAR.
Camera and light detection and ranging (LiDAR) are frequently used for perception in real-world applications. The combination of these heterogeneous sensors bring advantages of both kinds of sensors and get accurate and promising results. The extrinsic calibration of camera and LiDAR system is a prerequisite for robot perception applications, the robustness and usability are required in research and industry. Previous works have provided several extrinsic calibration methods including target-based works and target-less works. Although there are many works dealing with calibration of a monocular camera and a 3D LiDAR, the solutions of the calibration of the stereo visual system and 3D LiDAR still have not meet the requirement of the real-world application yet. In this work, we designed an extrinsic calibration algorithm which can be used for calibration of a stereo visual system and a 3D LiDAR system. Our method can estimate extrinsic parameters between a stereo visual system and a 3D LiDAR with only one checkerboard pose. We can further improve the result by a joint non-linear optimization considering LiDAR disparity constraint using multiple poses.