|||
|||
A real-time semantic edge detection network which can run with 100 FPS.
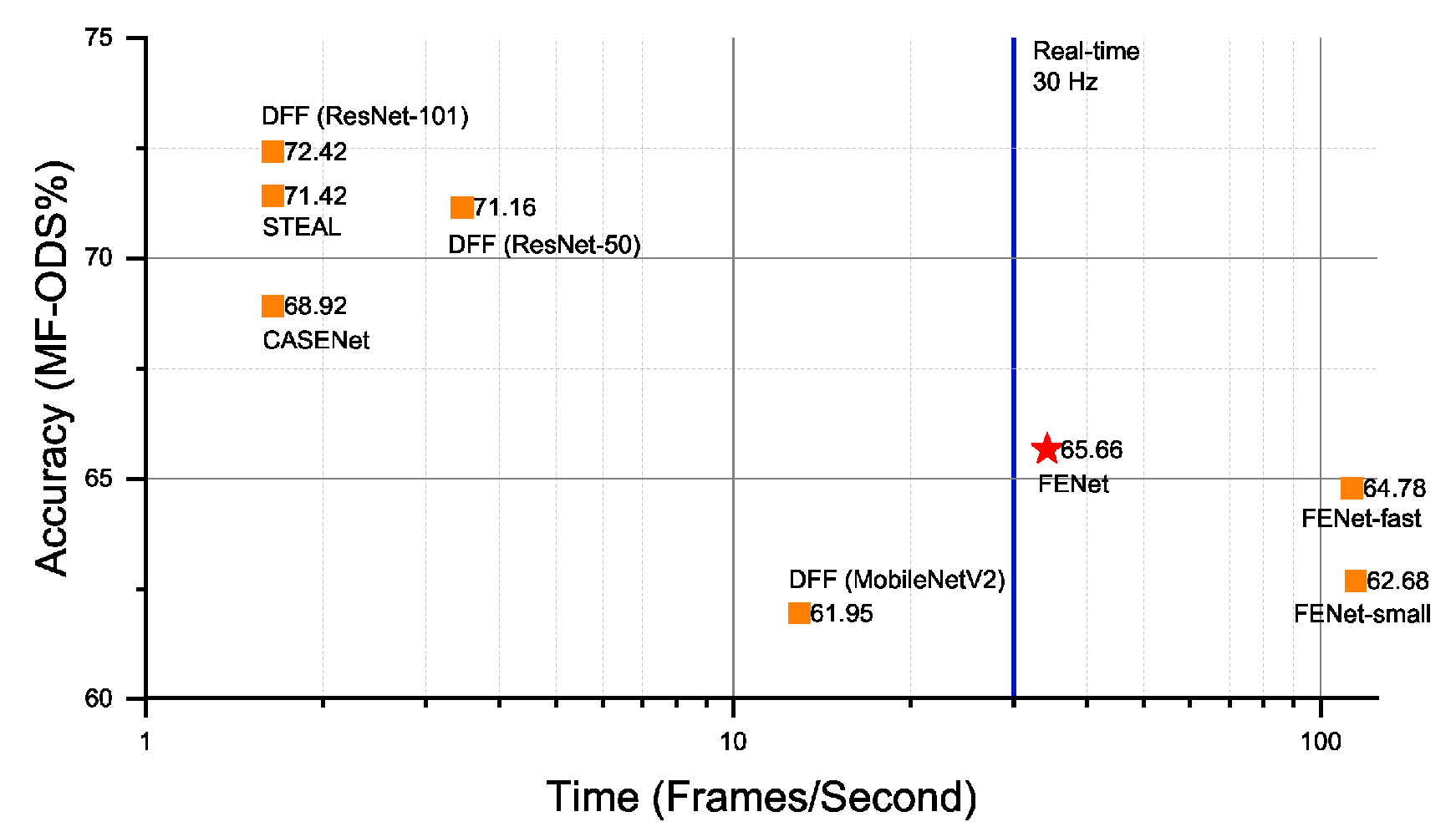 Speed benchmark of semantic edge detection methods on NVIDIA Jetson TX2. Our proposed methods can run with 30-100Hz.
Speed benchmark of semantic edge detection methods on NVIDIA Jetson TX2. Our proposed methods can run with 30-100Hz.
 Qualitative comparison of multiple semantic edge detection approaches on Cityscapes.
Qualitative comparison of multiple semantic edge detection approaches on Cityscapes.
Semantic edge is a geometric-aware semantic feature that can be leveraged in robotic perception systems for increased situational awareness and high-level environment understanding. This sparse representation nicely encapsulates the semantic information (object categories) within the geometric object boundaries. State-of-the-art semantic edge detection approaches require significant computation power and fail to approach real-time performance on embedded devices for robotic applications. In this paper, we present FENet (Fast Realtime Semantic Edge Detection Network), a semantic edge detection approach for robots with Size, Weight, and Power (SWaP) constraints. Specifically, we adopt MobileNetV2 as a lightweight backbone network, and we utilize joint pyramid upsampling to improve the system performance. We further reduce the model complexity and latency through network pruning and multiple upsampling strategies to adapt the model on embedded devices such as NVIDIA Jetson TX2. The proposed method is evaluated on Cityscapes with accuracy performances close to the state-of-the-art methods, but with substantially reduced computational complexity that speeds up the network by a factor of 10. To the best of our knowledge, FENet is the first real-time semantic edge detection network for robotic platforms.
@inproceedings{zhou2020fenet,
title={FENet: Fast Real-time Semantic Edge Detection Network},
author={Zhou, Yang and Ge, Rundong and McGrath, Gary and Loianno, Giuseppe},
booktitle={2020 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR)},
pages={246--251},
year={2020},
organization={IEEE}
}